



工业机器人离线编程与应用:直线程序示教案例
2020年9月7日11:00:45程序编辑页面2. 将光标移至END处,按下F1按键出现标准动作指令,选择3直线运动,如下图所示:

标准动作指令在此要注意TP必须为ON的状态,并且SHIFT不能按下,即SHIFT在上图上显示为深蓝色,否则无法进行选择;3. 将光标移到序号1的行,调整当前机器人的姿态,确定后同时按下SHIFT和F5点修正,保存当前的位置信息;

设置位置信息保存位置信息后,在仿真环境下需手动再次单击SHIFT键,该键在仿真环境下不会自动弹起,实际操作中不存在该问题。由上图可以看到保存了位置信息的语句前面会增添@符号,并且在机器人工作区域上也会添加位置点;
位置P14. 重复2和3添加另外两个位置点,若在调整是发现机器人无法动作,请注意查看是否出现异常报警,需按RESET键复位;5. 在添加了三个位置点后,因为第4个点的位置与**个点的位置是重复的,因此移动光标到P4所在位置后按下,输入1后再按ENTER键;

修改位置序号6. 通过上述步骤建立了全部的位置信息,在仿真机器人工作环境下也可以看到对应的位置信息已经建立;
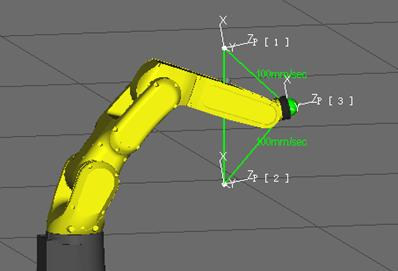
仿真机器人位置点7. 将光标移至**行,点击STEP进入单步运行,若再次点击则会进入自动运行,本案例中以单步为主。8. 按下SHIFT键和FWD键,机器人则按照设定的动作进行运行。在运行的过程中可以看到,机器人所在的对应位置序号前会有@符号。
